
Sensoren als Augen
Durch eine Vielzahl an Sensoren sammeln selbstfahrende Autos Informationen über ihre Umwelt. Damit planen sie die Fahrt und führen gewisse Aktionen aus – etwa beschleunigen, bremsen, Spur wechseln, etc.
Vereinfacht gesagt erstellt das selbstfahrende Auto mit vier Sensortypen ein Bild der Umgebung:
- Kameras: Wie unsere Augen nehmen Kameras die Umgebung bildlich wahr. Sie können Fahrstreifen, Hindernisse oder Geschwindigkeitsbeschränkungen erkennen und interpretieren. Sie haben aber die gleichen Nachteile wie unsere Augen – bei Dunkelheit, Schnee, Nebel oder Regen sehen sie weniger.
- Radar: Der Radar kann auch bei schlechtem Wetter die Umwelt auf einer grossen Distanz erkennen und Geschwindigkeiten gut abschätzen. Aber er kann z. B. Fahrstreifen oder Schilder nicht interpretieren.
- Lidar: Ein Lidar sendet Laserstrahlen aus und misst, wie lange es geht, bis sie wieder zurückkommen. Damit kann ein autonomes Fahrzeug auch Konturen sehr genau erkennen. Bei schlechtem Wetter ist das System momentan noch fehleranfällig.
- Ultraschall: Ultraschallsensoren decken die unmittelbare Umgebung des Fahrzeugs ab. Mit ihnen kann das Auto zum Beispiel selbständig in die Parklücke fahren.
Hinzu kommen natürlich noch die GPS Daten, die dem Auto zumindest auf ein paar Meter genau sagen können, wo es sich befindet.
Jeder Sensor hat seine Vor- und Nachteile. Deshalb brauchen selbstfahrende Autos eine Kombination aller Daten. So können sie sich ein sehr genaues Bild ihrer Umgebung machen. Die Schwäche eines Sensors kann mit der Stärke eines anderen kompensiert werden.
Anschauungsbeispiel Audi A8
Der neue Audi A8 kann schon heute im Stau auf der Autobahn bis 60 km/h das Steuer übernehmen*. Der Fahrer muss jedoch bereit sein, jederzeit das Steuer zu übernehmen (Level 3). Diese Sensoren machen es möglich:
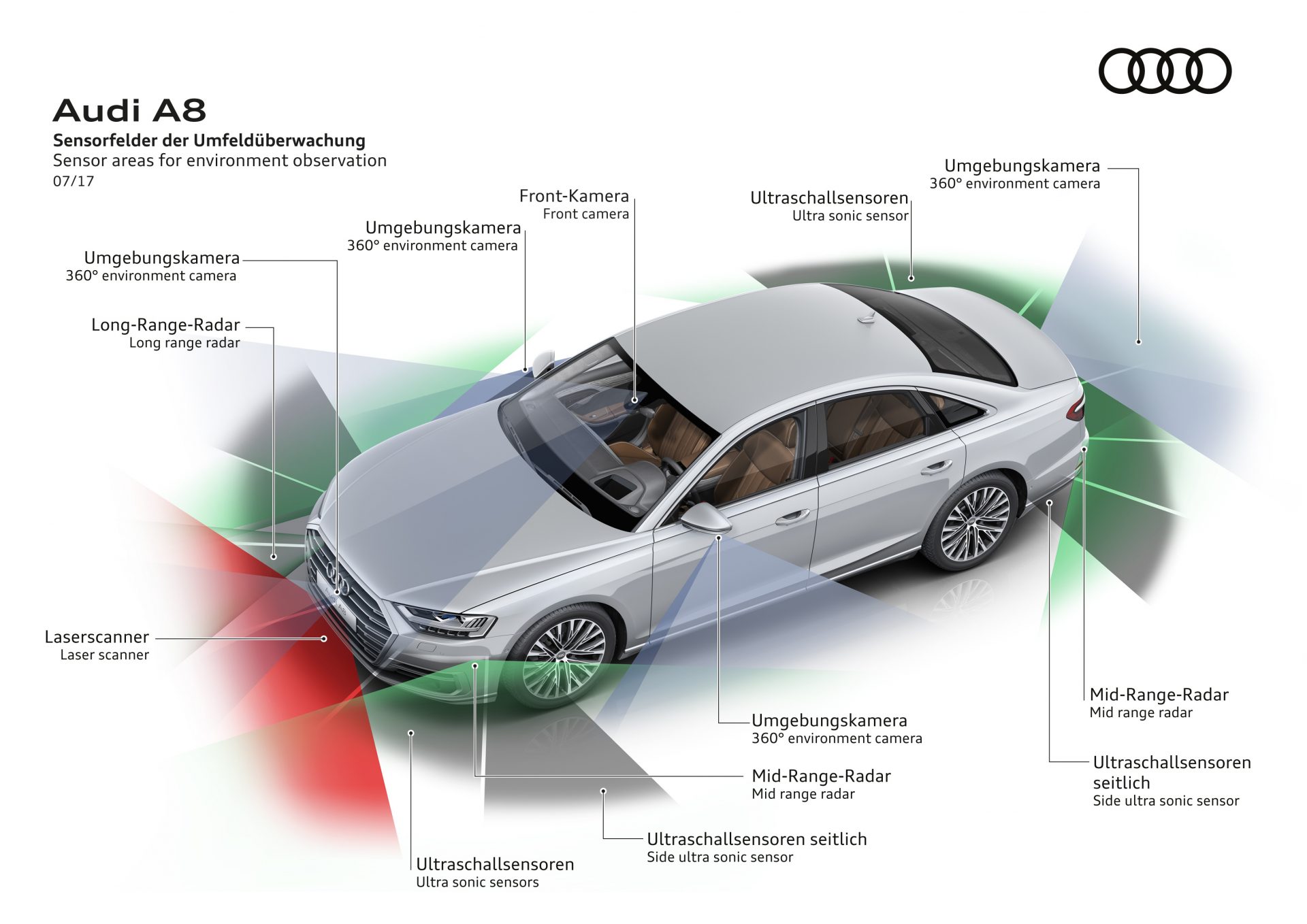
Mit den verschiedenen Sensoren errechnet der Audi A8 ein genaues Bild seiner Umgebung.
Wie und worüber kommunizieren die Fahrzeuge untereinander?
Sehen alleine genügt nicht. Ein grosser Vorteil von selbstfahrenden Autos ist, dass sie untereinander kommunizieren werden. Grundsätzlich können wir drei Arten der Kommunikation unterscheiden:
- Auto zu Auto: Das vorausfahrende Auto teilt den hinteren Fahrzeugen mit, wie schnell es fährt oder dass es bremst. Entdeckt es ein Hindernis, warnt es alle anderen Fahrzeuge auf der Strecke. Wenn z. B. auf der Autobahn ein Gegenstand die linke Fahrspur blockiert, erfahren das die anderen autonomen Fahrzeuge und können dementsprechend ausweichen. Es ist sogar denkbar, dass ein Auto auf die Informationen der anderen vertraut, wenn die eigenen Sensoren eine Störung aufweisen. So könnte es zumindest sicher aus dem Weg gehen.
- Auto mit Infrastruktur: Selbstfahrende Autos könnten sogar mit der Infrastruktur, also zum Beispiel Kreuzungen oder Ampeln kommunizieren. So können die Grünphasen je nach Verkehr angepasst werden und Unfälle in Kreiseln oder anderen heiklen Stellen vermieden werden. Zudem erhalten die Autos Informationen zum Strassenzustand (z. B. eine Eiswarnung).
- Auto mit mobilen Geräten: Autonome Fahrzeuge könnten mit Apps auf unseren Smartphones oder Tablets kommunizieren, damit wir während der Fahrt Filme schauen oder E-Mails schreiben können. Apps können wir einfach aktualisieren, so haben wir auch sicher immer die aktuellsten Karten geladen.
Die Technologie entwickelt sich zusehends. Momentan ist sie noch nicht so ausgereift, dass sie uns dauerhaft das Fahren abnehmen kann. Es dürfte deshalb noch eine Weile dauern, bis wir vollständig autonome Fahrzeuge im Verkehr antreffen.
*In der Schweiz ist dieses «pilotierte Fahren» noch nicht zugelassen.








